0
Torobo
Torobo is a professional humanoid robot designed for industrial automation, AI research, and advanced manipulation tasks. Equipped with dual 7-axis arms, torque sensors, ROS software support, and high-performance force control, it delivers exceptional precision and flexibility for robotics laboratories and industrial applications.
Description
Torobo
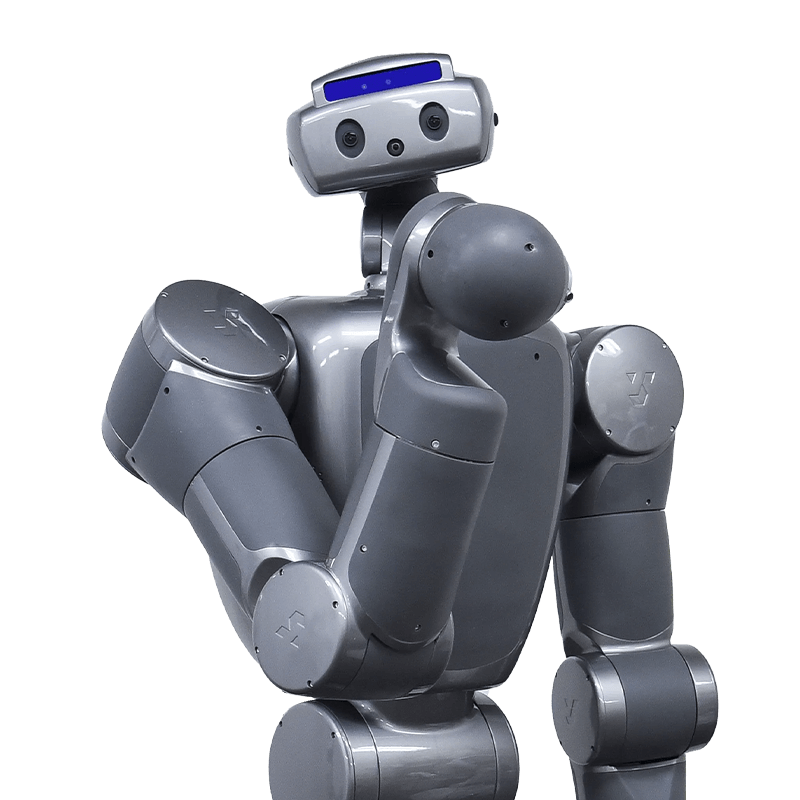
Torobo is an advanced humanoid robot developed by Tokyo Robotics for industrial automation, robotics research, machine learning, and human-robot interaction. Unlike many humanoid robots focused primarily on mobility, Torobo is designed around precise force control, manipulation, and safe interaction with objects and people. It features dual 7-axis robotic arms, a multi-axis waist and neck, torque sensors in every arm and waist joint, and a ROS-compatible software architecture.
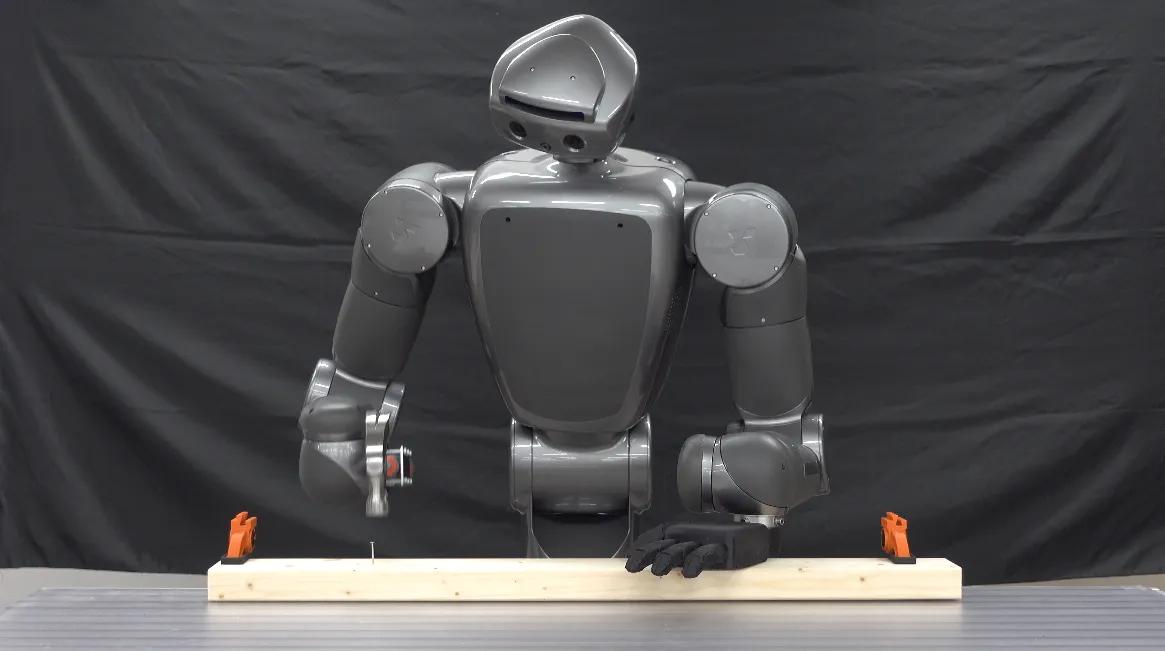
Torobo is particularly suitable for research institutions, universities, AI laboratories, advanced manufacturing facilities, and companies developing next-generation automation systems. Its impedance control technology enables delicate operations such as assembly, tool handling, object manipulation, and collaborative work alongside humans.
Key Features
- Advanced humanoid research platform
- Dual 7-axis robotic arms
- Full torque sensing on arm and waist joints
- High-precision impedance control
- ROS-compatible software ecosystem
- Compatible with Gazebo, MuJoCo, and Isaac Sim
- Omni-directional mobile base
- Human-scale workspace reach
- Safe human-robot interaction
- Industrial manipulation capabilities
- Machine learning and AI research support
- Modular sensor and end-effector configurations
- Optional vision and perception systems
Applications
Industrial Automation
- Assembly operations
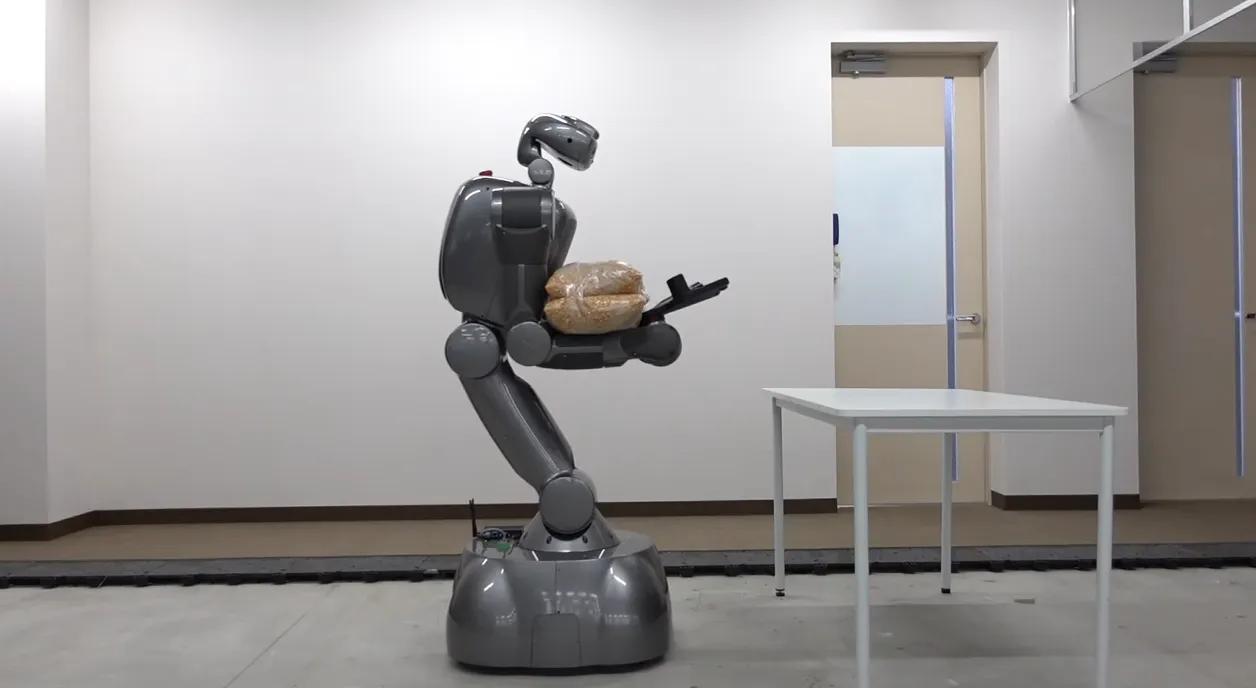
- Material handling
- Precision manufacturing
- Human-robot collaboration
Artificial Intelligence Research
- Reinforcement learning
- Embodied AI development
- Autonomous manipulation
- Machine learning experiments
Universities & Research Labs
- Robotics education
- Control system development
- Human-robot interaction studies
- Simulation and digital twin research
Advanced Service Robotics
- Inspection operations
- Laboratory automation
- Remote operation systems
- Collaborative robotic tasks
Why Choose Torobo?
Torobo stands out among humanoid robots because of its focus on force-sensitive manipulation and real-world interaction. With integrated torque sensing, advanced impedance control, and compatibility with major robotics simulation environments, Torobo provides a powerful platform for organizations developing future AI-powered robotic systems. Its industrial-grade engineering and research-focused architecture make it an ideal solution for advanced robotics laboratories and automation projects
Technical Specifications
| Specification | Torobo |
|---|---|
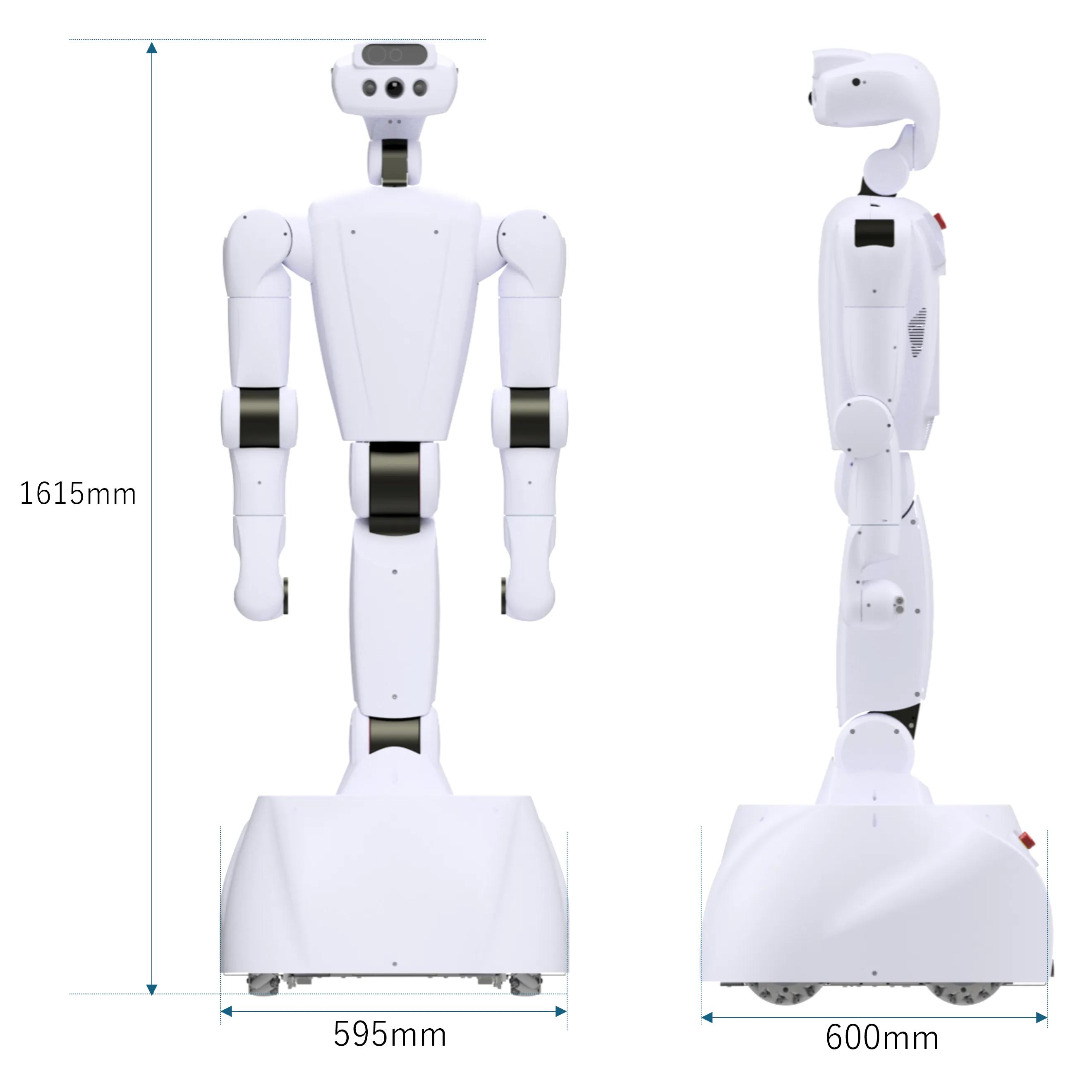
| Height | 1615 mm |
| Weight | Approx. 120 kg |
| Degrees of Freedom | 24+ |
| Arms | Dual 7-Axis Arms |
| Waist | 3 DoF |
| Neck | 3 DoF |
| Mobile Base | 4-Axis Omni-Directional |
| Payload (Continuous) | 7 kg per arm |
| Peak Payload | Up to 20 kg |
| Runtime | Up to 3 Hours |
| Vision Sensors | Optional Stereo, Fisheye & Depth Cameras |
| Audio Sensors | Stereo Microphones |
| AI Computing | Optional NVIDIA RTX Platform |
| Software | ROS Compatible |
| Simulation Support | Gazebo, MuJoCo, Isaac Sim |
| Applications | Research, AI Development, Industrial Automation |
Reviews
There are yet no reviews for this product.